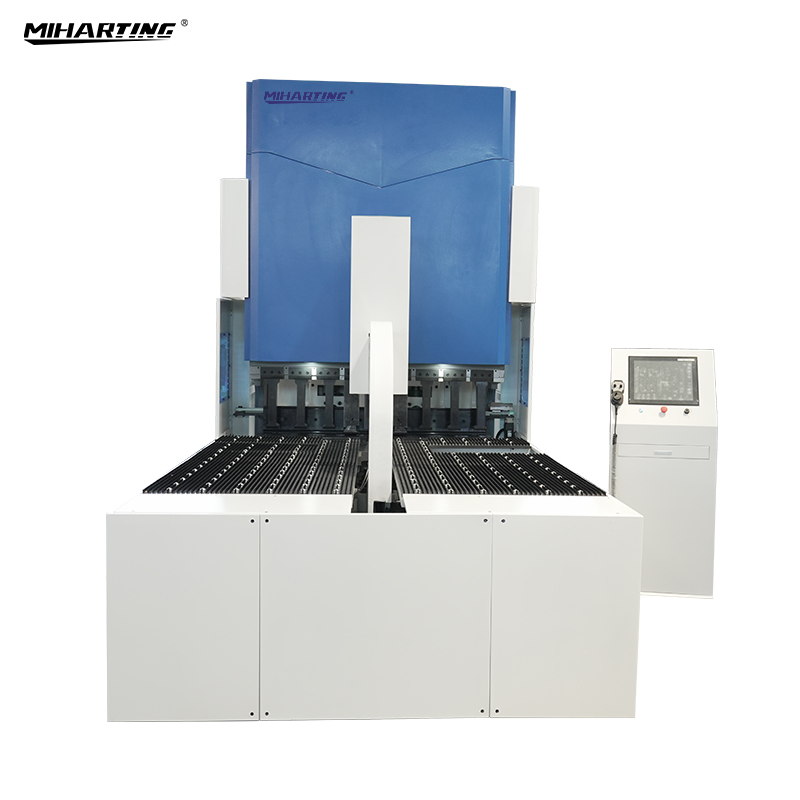


تفاصيل المنتج
*يحقق نظام التحكم ربطًا متزامنًا بـ 13 محورًا بالمعنى الحقيقي، وعمل الانحناء السلس، والتنسيق العالي للتشغيل الميكانيكي؛
* يمكن لنظام الكشف عن الحمل اللامركزي حماية الماكينة بشكل فعال لحماية قطعة العمل؛
* يمكن لنظام الكشف عن سماكة اللوحة أن يحمي الماكينة بشكل فعال ويقلل من هدر قطع العمل؛
* يمكن لنظام إدارة التشغيل والصيانة السحابية مراقبة تشغيل الجهاز في الوقت الفعلي؛
*بالنسبة لقطع العمل ذات الأحجام غير القياسية، يمكن تحديد مرجعيات تحديد موضع مختلفة وفقًا لشكل قطعة العمل، ويمكن التحكم في خطأ قص اللوحة على حافة الانحناء الأولى لضمان دقة الحجم بعد التشكيل.
وصف ذراع الروبوت:
تم اعتماد مناور ذاتي القيادة لنظام الانحناء، والذي يتميز بكفاءة عالية. من الضروري فقط تعديل برنامج الثني لاستبدال قطعة العمل. بعد تجميع برنامج الانحناء، يتم إنشاء برنامج المناول المقابل تلقائيًا. يمكن توصيله بسهولة بخطوط أو معدات الإنتاج الأولية والنهائية. ذراع الروبوت ذاتية القيادة المستخدمة:
يبلغ طول الذراع 2.5 متر، فئة 50 كجم، وطول قطعة العمل في حدود 2000 مم × 1000 مم ووزن قطعة العمل في حدود 25 كجم. 2 أذرع آلية للتحميل والتفريغ.

| الحد الأدنى من دقة النظام | 0.001 ملم |
| الأعلى. سرعة الانحناء | 0.2 ثانية/سكين |
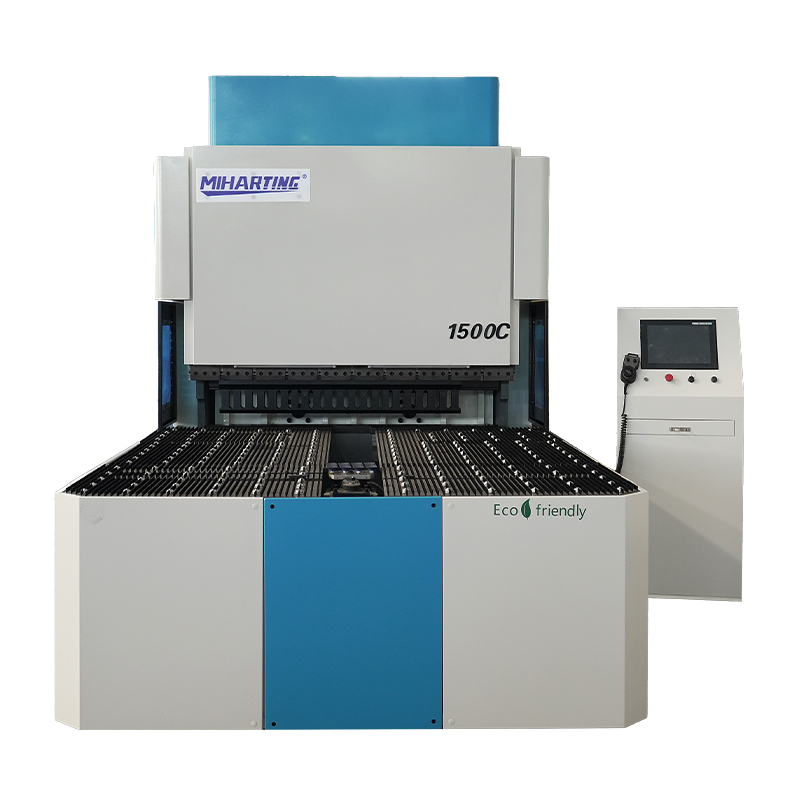
| أقصى عرض للانحناء | 2500 مم |
| الحد الأقصى لحجم الانحناء | الطول 2500X العرض 1250 مم |
| ارتفاع الانحناء | 170 ملم |
| الجهد المقنن | 380 فولت |
| قوة الذروة | 28 كيلو واط |
| متوسط القوة | 2.8 كيلو واط |
| الضوضاء | 50 ديسيبل |
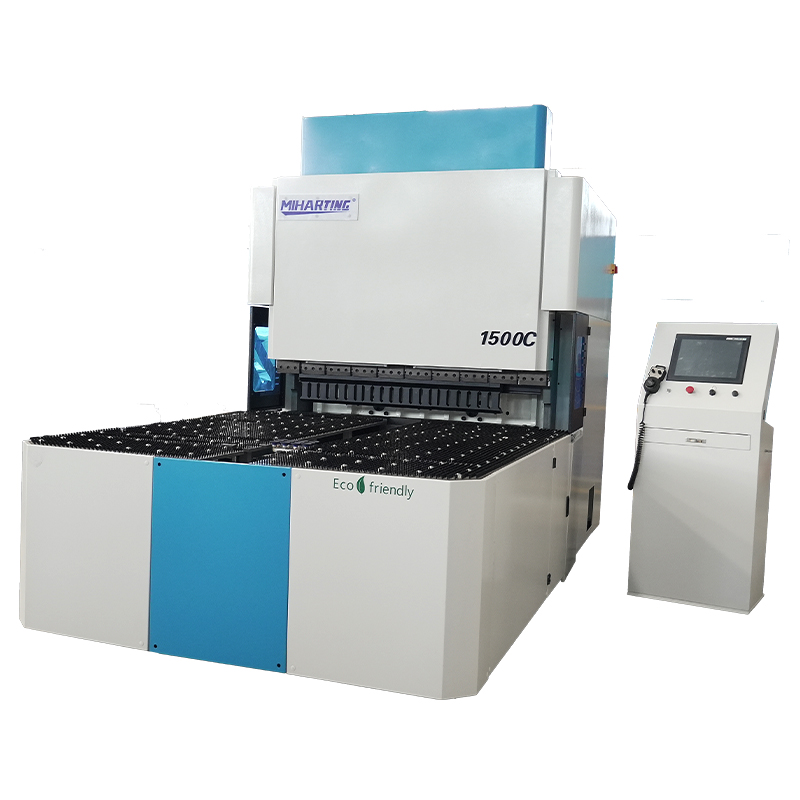
| الابعاد الكلية | 565 سم × 300 سم × 340 سم |
| وزن | 19 طن |
| نظام التشغيل | النظام فوق Win7 |
| الأعلى. سمك الانحناء | الفولاذ المقاوم للصدأ 1.2 ملم |
| لوح بارد 2.0 ملم | |
| لوح ألومنيوم 1.6 ملم | |
| الحد الأدنى للسمك | 0.35 ملم |
| دقيقة. الحجم الداخلي لتشكيل رباعي | 110 مم × 200 مم |
| الحد الأدنى للحجم الداخلي للتشكيل الثنائي | 110 ملم |
| الحد الأدنى لنصف القطر | 1.2 ملم |
| زاوية الانحناء | 0-180 درجة |
| عدد رمح | 13 |